Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
30.07.2020
Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
Асинхронные и синхронные электродвигатели имеют принципиальные отличия, которые во многом определяют сферу эксплуатации. Разница в конструкции позволяет в отдельных случаях более эффективно выполнять поставленные задачи на промышленных объектах. Наибольшее распространение получили асинхронные электродвигатели, но иногда выгоднее использовать синхронные аналоги.
Особенности строения и работы синхронных двигателей
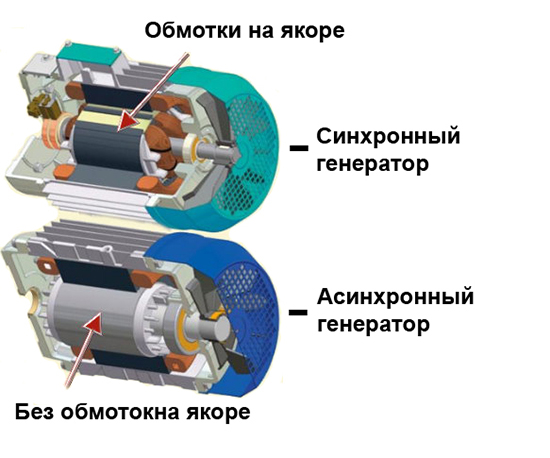
Внешне оба вида электрических двигателей очень похожи, но есть существенные различия в строении роторов. Эти элементы в случае с асинхронными устройствами не питаются электрическим током. При работе вращающееся магнитное поле образуется за счет МДС обмоток статора.
Ротор синхронных электродвигателей обладает обмоткой с автономным питанием. Статоры имеют идентичную конструкцию. Основная задача этих элементов заключается в формировании вращающегося магнитного поля во время работы.
Важно знать, что обороты синхронного двигателя совпадают по частоте магнитного поля, которое создает статор. Совершенно другая ситуация в случае с асинхронными электродвигателями. При работе под нагрузкой есть отставание от вращения магнитного поля непосредственно на величину скольжения. По этой причине выгоднее делать выбор в пользу синхронного двигателя, если требуется обеспечивать постоянные обороты при разных нагрузках.
Особенности строения и работы асинхронного двигателя
Сфера эксплуатации асинхронных электродвигателей в целом очень широка. Их активно применяют в различном оборудовании, где отмечается относительно равномерная нагрузка, а уменьшение оборотов не так существенно влияет на рабочий процесс. Такими двигателями оснащают станки, насосы, транспортеры и другие электрические установки.
Однако есть компрессоры и насосы, которые требуют поддержания определенной частоты оборотов при изменяющейся нагрузке, на них устанавливают синхронные двигатели.
Сравнение и преимущества асинхронных электродвигателей
Синхронные электродвигатели устанавливают в электроприводах, которые работают без регулировки частоты вращения. Перед асинхронными аналогами они имеют преимущества, которые касаются следующих моментов:
- КПД несколько выше;
- возможность работы при низкой частоте вращения, благодаря чему удается убрать промежуточные передачи между оборудованием и двигателем;
- отсутствие влияния нагрузки, передаваемой на вал двигателя, на частоту вращений;
- возможность применения в качестве компенсирующих приспособлений реактивной мощности.
При необходимости синхронные двигатели могут выступать в роли генераторов или потребителей реактивной мощности. Основные параметры будут зависеть от величины электрического тока непосредственно в обмотке.

